INTERVIEW

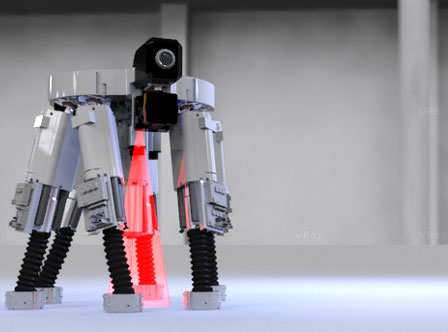

The University of Nottingham and IK4-TEKNIKER have been collaborating within the framework of the MiRoR project on the development of a fairly small hexapod robot, capable of performing machining tasks on large parts.
1.- What are the advantages of this solution comparing to the ones available in the market?
Rolls-Royce University Technology Centre (UTC) at University of Nottingham has been previously collaborating with IK4-TEKNIKER on developing the “first generation” Free-Leg-Hexapod to being use in repair of marine propulsion systems; when knew back then, in 2009 that the this type of configuration offers great ability to perform in-situ machining/inspections of large structures at very quick deployment times (<10%), significant reduced machine weight (<12%) while offering full 6-axis machining capabilities. No wonder that Rolls-Royce and the UTC at Nottigham has filed a patent on this topic. From the assessment of these outstanding capabilities of this initial system, we span out the “second generation” system, Walking Free-Leg Hexapod that is being developed within the MiRoR FP7 project. This will not only have the 6-machining, portability and easy calibration capabilities but presents the ability to walk and position itself to the place of intervention. Imagine you want to make a complex machining operation into a hazardous environment (e.g. radioactive); the Walking Hexapod will guide itself to the place of intervention, calibrate the end-effector against the feature to be processes and perform 6-axis operations. No such system exist at the moment.
2.- Rolls-Royce is already using a similar robot, what tasks for?
As mentioned above the performances of 1st generation system, Free-Leg-Hexapod, have been evaluated in conditions similar to in-situ repair of marine propulsion system. The 2nd generation, Walking Hexapod, is envisaged to be respond to in-situ repair of nuclear facilities, hence its need to walk itself to the place of intervention.
3.- In your opinion, what are other suitable applications?
With its unique abilities, the Walking Hexapod is the “perfect tool” to perform in-situ inspection/non-destructive testing/material removal or deposition processing on high-investment installations to prolong their operation lives while avoiding non-productive stoppages. Obvious applications are those related to power generation/aerospace (airframes)/offshore/defense/construction industries. Anything installation that is big and expensive to dismantle for being repaired falls in the remit of our Walking Hexapod.
4.- Is the MiRoR project the beginning of a change in the current trend of bigger and bigger machine-tools?
Indeed, we have observed that with the initial publications and media releases of the 1st generation system, Free-Leg-Hexapod the machining/repair community has realized that there is another way to repair large installations. Now, with the development of Walking Hexapod under MiRoR FP7 we could observe that the community is picking up speed on this approach. Nevertheless, we feel that the MiRoR consortium has unique background knowledge and great opportunity to keep developing truly original solutions to keep us ahead.
5.- What do you think it is the rol of research centres like IK4-TEKNIKER in the development of this kind of industrial robots?
It is curious to say this but visiting IK4-TEKNIKER I feel “at home” and working with its engineers/researchers gives me the feeling of technical maturity. It is something more than innovation; is about the certainty that an idea (generated within a group of enthusiastic researchers) can be put in practice. This is what makes IK4-TEKNIKER a unique partner to work with.