ELKARRIZKETA

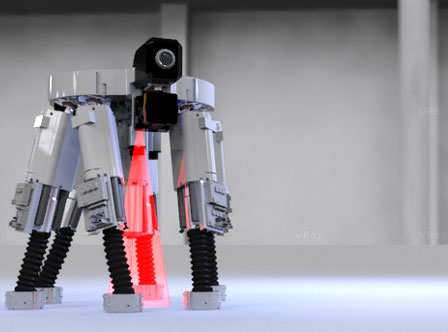

Nottinghameko Unibertsitateak eta IK4-TEKNIKERek elkarrekin lan egin dute MiRoR proiektuaren esparruan, robot hexapodo bat garatzen. Robot txiki samarra da, pieza handietan mekanizazio-lanak egiteko gai dena.
1.- Zer abantaila ditu soluzio honek merkatuan dauden beste batzuen aldean?
Nottinghameko Unibertsitateko Rolls-Royce UTC unibertsitate-zentro teknologikoak lan egin du, lehenago ere, IK4-TEKNIKERekin; hanka askeko robot hexapodo baten lehen belaunaldia garatu genuen, Free Leg Hexapod deritzona, itsas propultsioko sistemetan erabiltzeko. Orduan konturatu ginen, 2009an, konfigurazio horrek ahalmen handia zuela egitura handiak in situ fabrikatzeko eta ikuskatzeko oso hedapen-denbora azkarretan (<%10), asko murrizten zuela makinen pisua (<%12), eta 6 ardatzetan mekanizatzeko ahalmena izaten jarraitzen zuela. Ez da harritzekoa Rolls-Roycek eta Nottinghameko UTCek sistema hori patentatu izana. Hasierako sistema haren gaitasunak oinarri hartuta, bigarren belaunaldiko sistema bat garatu genuen, Walking Free Leg Hexapod-a (hanka askeko hexapodo mugikorra), MiRoR FP7 proiektuan. 6 ardatzeko fabrikazioa, eramangarritasuna eta kalibrazio erraza eskaintzeaz gainera, sistema hori gai da ibiltzeko eta bere burua jarduera-tokian kokatzeko. Pentsa ezazu fabrikazio-eragiketa konplexu bat egin nahi duzula ingurumen arriskutsu batean (adibidez, ingurumen erradioaktibo batean); hexapodo mugikorra berez joango da jarduera-tokira, xede-efektorea prozesatu nahi dugun ezaugarriarekiko kalibratuko du, eta 6 ardatzetan lan egingo du. Ez da halako beste sistemarik ezagutzen.
2.- Rolls-Royce dagoeneko ari da halako robot bat erabiltzen. Zertarako?
Esan dugun moduan, lehen belaunaldiko sistema, Free Leg Hexapod-a, itsas propultsioko sistemak in situ konpontzeko egoeretan eta antzekoetan ebaluatu da. Bigarren belaunaldia, Walking Hexapod-a, instalazio nuklearrak in situ konpontzeko pentsatua dago; beraz, gauza izan behar du jarduera-tokira berez joateko.
3.- Zure ustez zer beste erabilera izan ditzake?
Gaitasun paregabeak dituenez, Walking Hexapod-a tresna ezin hobea da inbertsio handiko instalazioetan ikuskapenak in situ egiteko, proba ez-destruktiboak egiteko edo materiala kendu nahiz jartzeko, haien bizitza operatiboa luzatzeko aukera ematen duelako eta geldialdi ez-produktiboak ekiditen dituelako. Erabilera nabarmenenak energia-sorkuntzan ditu, bai eta aeroespazio-industrian, itsas industrian, defentsan eta eraikuntzan ere. Gure Walking Hexapod-a egokia da konpondu nahi den instalazioa handia eta desmantelatzeko garestia denean.
4.- MiRoR proiektua izango al da, zure ustez, gero eta makina-erreminta handiagoak egiteko dugun joeraren aldaketaren hasiera?
Egia esan, konturatu gara lehenengo Free Leg Hexapod belaunaldiari buruzko argitalpen eta prentsa-oharrei esker fabrikazioaren eta konponketaren komunitatea jabetu dela badagoela beste modu bat instalazio handiak konpontzeko. Gaur egun, MiRoR FP7 proiektuan, Walking Hexapod sistemaren garapenarekin, ikusi dugu komunitatea azkar ari dela sistema honetara hurbiltzen. Nolanahi ere, uste dugu MiRoR kontsortzioak eskarmentu eta jakintza handia dituela eta ikaragarrizko aukerak dituela lidergoan mantenduko gaituzten soluzio benetan originalak garatzeko.
5.- Zein da zure ustez IK4-TEKNIKERen zeregina halako robot industrialen garapenean?
Bitxia da esango dudana, baina IK4-TEKNIKERen etxean bezala sentitu naiz. Bertako ingeniari eta ikertzaileekin lan egin dudanean, haien heldutasun teknikoa sentitu dut. Kontua ez da bakarrik berritzea, baizik eta ikertzaile gogotsu batzuek sortutako ideia bat praktikan jar daitekeelako ziurtasuna izatea. Horregatik da IK4-TEKNIKER lanerako kide aparta.